你知道三种步进电机驱动方式的优缺点吗?
步进电机驱动方式有三种,但你知道其中的区别吗?不知道?呵呵,我来带你瞅一瞅。
众所周知,步进电机的驱动办法有整步,半步,细分驱动。三者既有差异又有联络,现在,市面上许多驱动器支撑细分驱动办法。
我们都知道步进电动机是一种把电脉冲信号转换成机械角位移的操控电机,常作为数字操控体系中的履行元件。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向滚动一个固定的视点(这个视点叫做歩距角)。
正常运动情况下,它每转一周具有固定的步数;做接连步进运动时,其旋转转速与输入脉冲的频率坚持严格的对应联系,不受电压动摇和负载改变的影响。本文小编将带领我们具体的了解步进电机整步驱动、半步驱动、细分驱动的工作原理及优缺陷。
步进电机的驱动办法
如下图是两相步进电机的内部定子示意图,为了使电机的转子能够接连、平稳地滚动,定子有必要发生一个接连、均匀的磁场。因为从微观上看,电机转子一直跟从电机定子组成的磁场方向。假如定子组成的磁场改变太快,转子跟从不上,这时步进电机就出现失步现象。
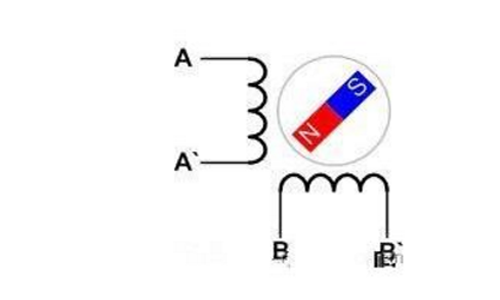
一文解析步进电机三种驱动办法的优缺陷
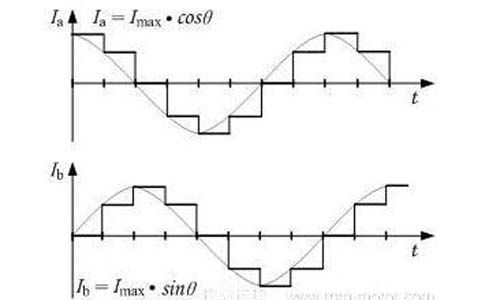
既然电机转子是跟从电机定子磁场滚动,而电机定子磁场的强度和方向是由定子组成电流决议且成正比。即只需操控电机的定子电流,则能够达到驱动电机的目的。下图是两相步进电机的电流组成示意图。其间Ia是由A-A`相发生,Ib是由B-B`相发生,它们两个组成后发生的电流I就是电机定子的组成电流,它能够代表电机定子发生磁场的巨细和方向。
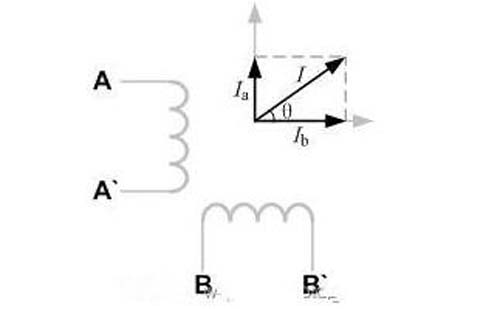
一文解析步进电机三种驱动办法的优缺陷
根据以上步进电机的布景描绘,关于步进电机的整步、半步、细分的三种驱动办法,都会是同一种办法,仅仅电流把一个圆(360°)切割的粗细程度不同。
1、整步驱动
关于整步驱动办法,电机是走一个整步,如关于一个步进角是3.6°的步进电机,整步驱动是每走一步是走3.6°。
下图是整步驱动办法中,电机定子的电流次序示意图:
由上图可知,整步驱动每一时间只要一个相通电,所以这种驱动办法的驱动电路能够是很简略,程序代码也是相对简略完成,且由上图能够得到电机整步驱动相序如下:
BB’→A’A→B’B→AA’→BB’
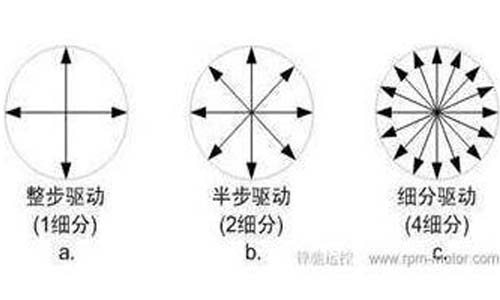
下图是这种驱动办法的电流矢量切割图:
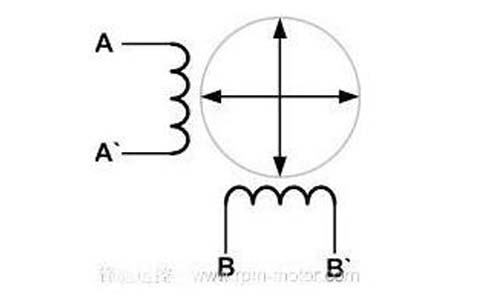
一文解析步进电机三种驱动办法的优缺陷
可见,整步驱动办法的电流矢量把一个圆均匀切割成四份。
下图是整步驱动办法的A、B相的电流I vs T图:
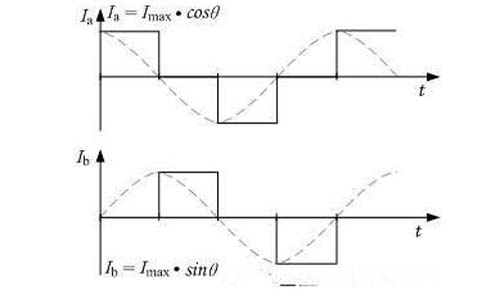
一文解析步进电机三种驱动办法的优缺陷
总结:
能够看出,整步驱动的缺陷:描出的正弦波是粗糙的。运用这种办法驱动步进电机,低速时电时机颤动,噪声会比较大。可是,这种驱动办法的长处:不管在硬件或软件上都是相对简略,从而驱动器制作本钱简略得到操控。
2、半步驱动
关于半步驱动办法,电机是走一个半步,如关于一个步进角是3.6°的步进电机,半步驱动是每走一步,是走1.8°(3.6°/2)。
下图是半步驱动办法中,电机定子的电流次第示意图:

一文解析步进电机三种驱动办法的优缺陷
由上图可见,半步驱动办法的比整步驱动办法相对杂乱一些,在同一时间,可能两个相都需求被通电,假如要求电机滚动的力矩平稳,则需求在两相一起通电时,通电电流应该为单相通电电流的sin(45°),即√2/2。当然,能够直接通以和单相通电流持平的电流,结果是电机滚动进程中的力矩不稳定,但它带来的优点是驱动电路或软件编写的简化。
以下是这种的驱动办法的驱动相序:
BB’→BB’ A’A→A’A→B’B A’A→ B’B→B’B AA’→AA’→ AA’ BB’
假如需求回转,只需按以上相序的逆向进行通电即可。
当按以上相序对电机通电,发生的电流矢量则能够把一个圆切割成8份,如下图所示:
半步驱动一方面使电机的步进分辨率进步了一倍,且电机工作会更为平稳。
比照地,半步驱动办法的两相电流图如下图所示:
一文解析步进电机三种驱动办法的优缺陷
总结:
由上图看出,半步驱动办法的长处:描出的正弦波较之整步驱动办法,有了改观,进步了精度。这样的优点是在无需更改电机的情况下,电机的步进角分辨率进步了一倍,且电机工作相对安静一些。
3、细分驱动
如下图,能够看出某种规则:
一文解析步进电机三种驱动办法的优缺陷
看上图,电流矢量切割圆越来越稠密,如上图的c。这是4细分驱动的切割图,从微观上可幻想,电机转子走一步的视点将会随着细分数的添加而减小,电机滚动也越来越平稳、安静。从某种意义上,整步和半步驱动也是细分驱动的相同,它们的联系就如正方形和长方形的联系。

一文解析步进电机三种驱动办法的优缺陷
上图是4细分驱动办法的两相电流图,由图看出,这时每相电流的曲线较半步驱动时的电流曲线愈加细腻。
电流细分是细分驱动的其间一种办法,恒流的完成常用斩波驱动,给定的电流是以正弦波散布。另一种为电压细分,这种办法是比正弦波的电压驱动电机的线圈,能够不需求反应地完成电机的细分驱动,可是因为电机的反电势等的作用,正弦波电压驱动并不能发生正弦波的电流,作用没有电流细分好,可是它的驱动电路相对简略。
总结:
细分能够进步电机的步进角分辨率,可是,这并不是细分驱动的初衷,而是为了减缓步进电机工作进程的轰动和噪声,使电机的力矩输出更平稳。这有点像数码相机的光学变焦和数字变焦的联系,进步步进体系分辨率最好依托电机自身和机械结构。
在工程使用中,电机的细分数可能不同,在低速时,可增大细分数,当速度添加时,减少细分数。


